










Опыт использования компонентов T-FLEX при кинематическом и динамическом анализе механизмов
Автор: Плахтин Владимир, Давыдов Анатолий, Стрыгин Сергей
ГОУ ВПО «Московский государственный открытый университет» Рязанский институт (филиал)
Необходимость проведения кинематического и динамического анализа механизмов возникает во многих случаях, в частности при проектировании новой техники, ремонте и/или совершенствовании (модернизации) оборудования, находящегося в эксплуатации, а также в учебных и научных целях. При этом, как правило, требуется выполнить эти исследования в максимально сжатые сроки.
Применение САПР в таких случаях вполне оправданно, так как они позволяют реализовать инновационные технологии 3D-моделирования сложных объектов, создание их цифровых прототипов, основанных на ассоциативных параметрических связях между моделью и чертежом.
По роду задач, решаемых в стенах технического вуза, авторам приходилось в той или иной степени сталкиваться с указанной проблематикой практически во всех ее проявлениях. Стремительное развитие персональных компьютеров и их программного обеспечения ставит перед вузами проблемы, связанные не только с приобретением и освоением новейших аппаратных и программных средств, но и с методологией их использования в учебном процессе. Однако, помимо разработок и совершенствования методических указаний, возникает необходимость в расширении области применения программных средств. При этом важная роль отводится более глубокому освоению программных продуктов. Одним из решающих факторов, определяющих этот уровень освоения ПО, является перспективность программного средства в плане его использования студентами в их дальнейшей учебной и профессиональной деятельности.
Исходя из этого можно рекомендовать отечественную систему трехмерного моделирования и параметрического проектирования T-FLEX CAD, входящую в программный комплекс T-FLEX фирмы «Топ Системы». Такой выбор соответствует преимущественно машиностроительному профилю подготовки студентов, а возможности системы, помимо прочего, позволяют создавать базы знаний на основе пополняющихся пользователями библиотек параметрических моделей.
Дисциплина «Теория механизмов и машин» (ТММ) обеспечивает, наряду с другими общеинженерными дисциплинами, преемственность знаний при переходе от общенаучных к профилирующим учебным дисциплинам. На базе T-FLEX CAD осуществляется автоматизация графоаналитических расчетов и проектирования различных механизмов и машин при проведении практических занятий и выполнении курсовых проектов.
На практике весьма эффективна организация кинематических расчетов плоских рычажных механизмов на основе параметрических моделей их кинематических схем. Кинематические параметры одноподвижных плоских рычажных механизмов с вращающимся начальным звеном вычисляются через угол поворота, угловые скорость и ускорение начального звена. С этой целью из диапазона изменения угла j поворота начального звена выбирается ряд значений с малым постоянным шагом Дj. Для каждого из выбранных значений вычисляются необходимые кинематические параметры механизма. Поскольку для обеспечения требуемой точности расчетов Дj мал, приходится выполнять либо многочисленные вычисления по одним и тем же формулам, либо однотипные построения при использовании графоаналитических методов. С учетом того, что формулы кинематических расчетов просты, алгоритмы вычислений являются цепочными, а графические построения легко параметризуются, для кинематических исследований можно рекомендовать плоскостное (2D) параметрическое проектирование. Параметрические модели получаются простыми, но различаются для механизмов разных схем. Проектировщику не составит труда самостоятельно разработать параметрическую модель для расчета конкретного плоского рычажного механизма.
|
|
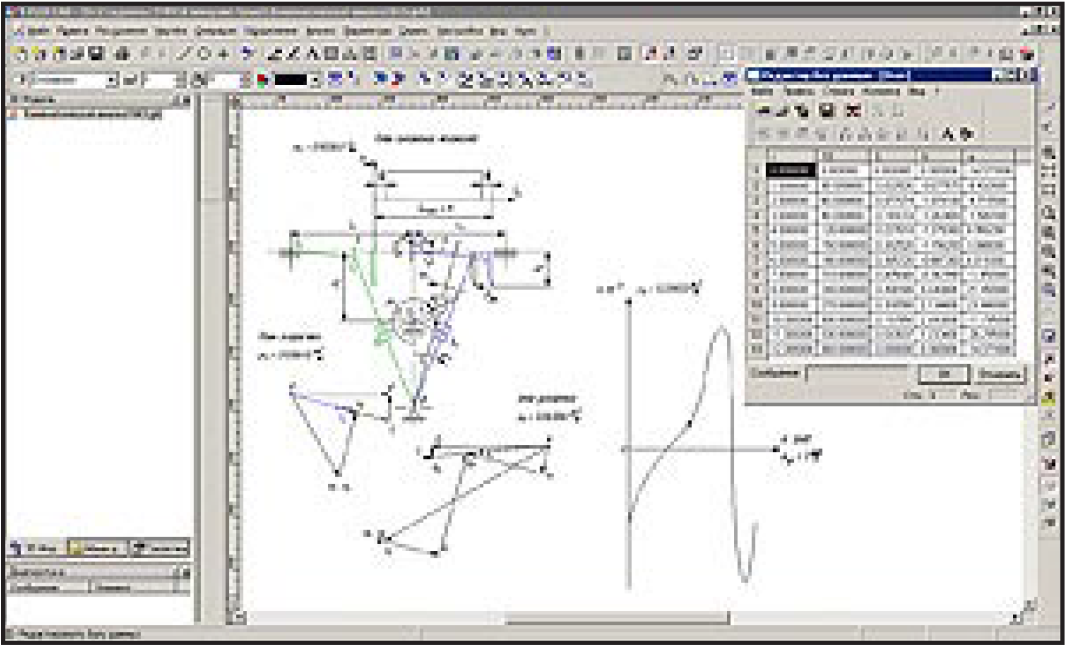
Кинематический анализ механизма графоаналитическим методом на основе параметрической модели с проверкой результата вычислений по базе данных с известными решениями |
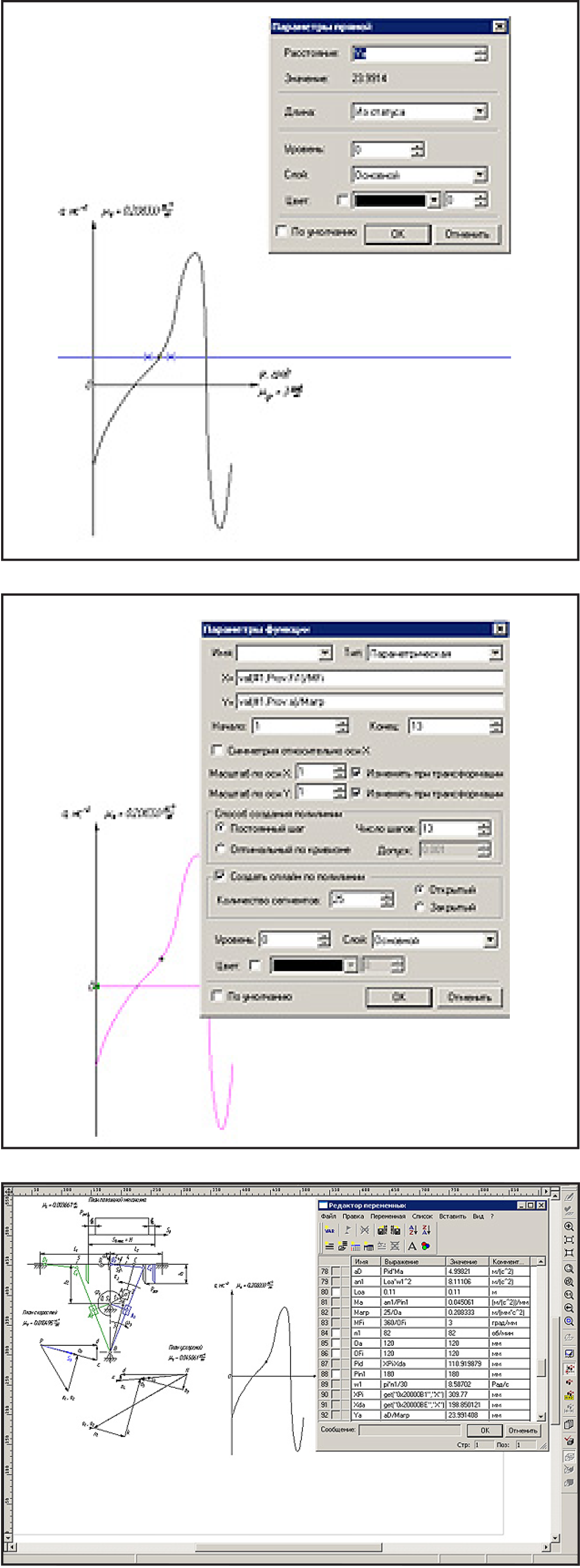
Для проверки правильности вычислений и наложенных при создании параметрической модели соответствующих взаимосвязей сравним результаты с аналогичными, полученными при кинематическом анализе этого же механизма с помощью специальной программы, например «TMM-KP. Интегрированная система курсового проектирования по теории механизмов и машин» (автор В.Ю.Лавров, г.Санкт-Петербург, Балтийский государственный технический университет, кафедра прикладной механики) (далее — ТММ-КР).
Для решения поставленной задачи используем следующую методику. Полученные с использованием программы ТММ-КР таблицы значений координат (перемещения), скоростей и ускорений рабочего органа рассматриваемого механизма в функции обобщенной координаты j (угол поворота кривошипа) для 12 положений механизма в период его кинематического цикла (один оборот кривошипа) сохраняются в формате *.tab на жестком диске компьютера. Затем с помощью мастера текстов (импорт) табличного редактора MS Excel преобразуем соответствующий документ формата *.tab в документ MS Excel (*.xls). Для использования полученного документа при создании базы данных по ссылке с помощью редактора баз данных T-FLEX CAD в строке над диапазоном с соответствующими числовыми значениями кинематических характеристик добавляют их текстовые обозначения. Последние определяют имена полей формируемой базы данных.
Кроме того, диапазону ячеек с текстовыми обозначениями и числовыми значениями кинематических характеристик присваивается какое-либо имя. Полученный файл формата *.xls также сохраняется на жестком диске компьютера. Таким образом, в параметрической модели T-FLEX создается база данных по ссылке на этот файл. Для того, чтобы рабочая информация хранилась в одном файле формата документов T-FLEX CAD, полученная база данных сохраняется как внутренняя база данных T-FLEX CAD. После этого база данных T-FLEX CAD по ссылке может быть удалена. В документе T-FLEX CAD на основе числовых значений созданной внутренней базы данных, элементов построения (узлов, прямых и сплайнов), элементов изображения (линий изображения, текстов) и переменных, вводимых для задания соответствующих масштабных коэффициентов, создается кинематическая диаграмма ускорения рабочего органа рассматриваемого механизма, которая и принимается за эталонную.
|
|
Проверка результата по базе данных с известными решениями, на основе которой построен график: а - эталонная кинематическая диаграмма ускорений; б - параметры функции (линии построения) эталонной кинематической диаграммы ускорений; в - некоторые переменные параметрической модели кинематического анализа плоского рычажного механизма (точка на графике - текущее расчетное значение; с параметрической модели плана ускорений) |
Использование этой функциональной возможности в сочетании с программной реализацией графического дифференцирования функции положения по обобщенной координате или по времени позволяет с заданной точностью и при малом объеме графических построений, выполняемых пользователем, применять известный метод кинематических диаграмм при автоматизированном кинематическом анализе механизмов. Задача исследования движения пространственного неразветвленного открытого механизма измерительного манипулятора в математическом плане достаточно сложна. До появления современных САПР, поддерживающих параметризацию, использовались в основном методы расчета в аналитической форме с привлечением элементов теории матриц и винтового исчисления. Трехмерное моделирование с применением механизма сборки по сопряжениям позволяет решать задачи позиционирования отдельных механизмов, узлов и деталей машин относительно выбранных баз. В качестве примера приведем решение задачи позиционирования измерительного приспособления при разработке контрольной технологической операции. С помощью пространственной параметрической модели манипулятора измерительной системы Sigma arm manual оперативно решается задача выбора его оптимального типоразмера (модели) для измерения заданной детали.
В процессе динамического анализа решаются две основные задачи:
- определение действующих на звенья механизма усилий, в том числе давлений в кинематических парах, при воспроизведении механизмом заданного закона движения (силовой расчет);
- изучение реального движения механизма под действием выбранного привода и определение способов приближения этого движения к заданному (исследование динамики).
Необходимо отметить, что выполнить полный расчет всех параметров проектируемого механизма по заданному закону движения ведомого звена с первой попытки невозможно из-за сложности задачи. Поэтому вначале выбирают схему механизма, производят ее кинематический расчет, далее звенья задаются в виде физических тел и выполняется силовой расчет, по результатам которого проверяются условия прочности и уточняются конструкции звеньев. Только теперь можно исследовать движение полученного механизма под действием привода и вносить в конструкцию необходимые изменения. Если звенья механизма задать в виде конкретных физических тел, программный модуль динамического анализа по собранной с использованием сопряжений и разрешенных степеней свободы трехмерной параметрической модели позволяет оперативно решать задачи динамического анализа. Определить материал, форму, массу и момент инерции звеньев, а также выбрать для каждой кинематической пары ее конструкцию и размеры, задать характеристики трения на первом этапе представляется возможным лишь интуитивно.
Однако точного конструктивного представления звеньев и кинематических пар при решении задач динамического анализа с помощью T-FLEX Динамика, по крайней мере на начальных этапах, не требуется. Важно лишь обеспечить соответствие инерционных параметров и характеристик трения. Если решать такую задачу на основе трехмерной параметрической модели этой схемы, то достаточно использовать звенья простых геометрических форм и конструкций.
|
|
Пространственная (3D) параметрическая модель манипулятора измерительной системы Sigma arm manual с измеряемой деталью: решение задачи о положениях механизма |
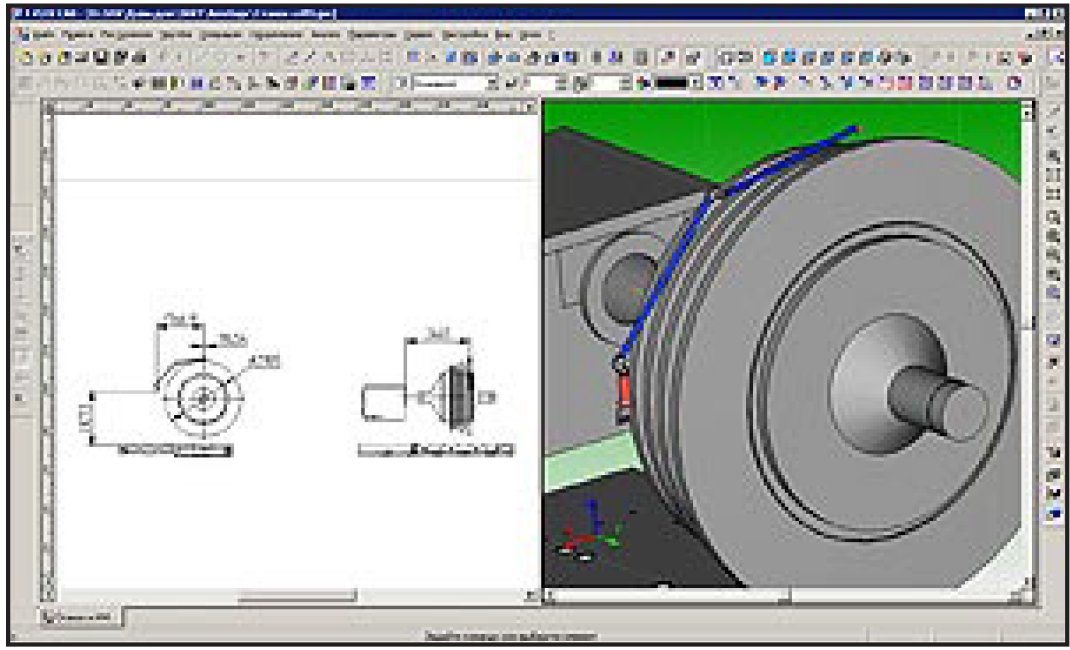
В этом случае определение (подбор) некоторых размеров в зависимости от заданного пользователем значения массы или момента инерции относительно заданной оси легко автоматизируется. Сборка механизма, сформированная с использованием сопряжений, может служить основой для разработки конструкции механизма или машины, проведения вычислительного эксперимента с применением программного модуля динамического анализа механических систем T-FLEX Динамика. Собранная по сопряжениям пространственная твердотельная модель механизма может быть обработана в автоматическом режиме модулем динамического анализа (собственная разработка АО «Топ Системы») на предмет распознавания (формирования) шарниров. Шарниры создаются автоматически одновременно с созданием задачи (элемента параметрической модели) на основе сопряжений и разрешенных степеней свободы графических элементов 3D-модели. При внесении изменений в сопряжения модели состав шарниров изменяется автоматически при обновлении задачи. Пользователь может дополнительно отрегулировать механические свойства, установив параметры трения. После этого формируется силовое нагружение (доступны следующие виды нагружений: сила, вращение, крутящий момент, пружина) звеньев механизма.
|
|
Подбор наружного диаметра маховика по заданному моменту инерции для его трехмерной параметрической модели |
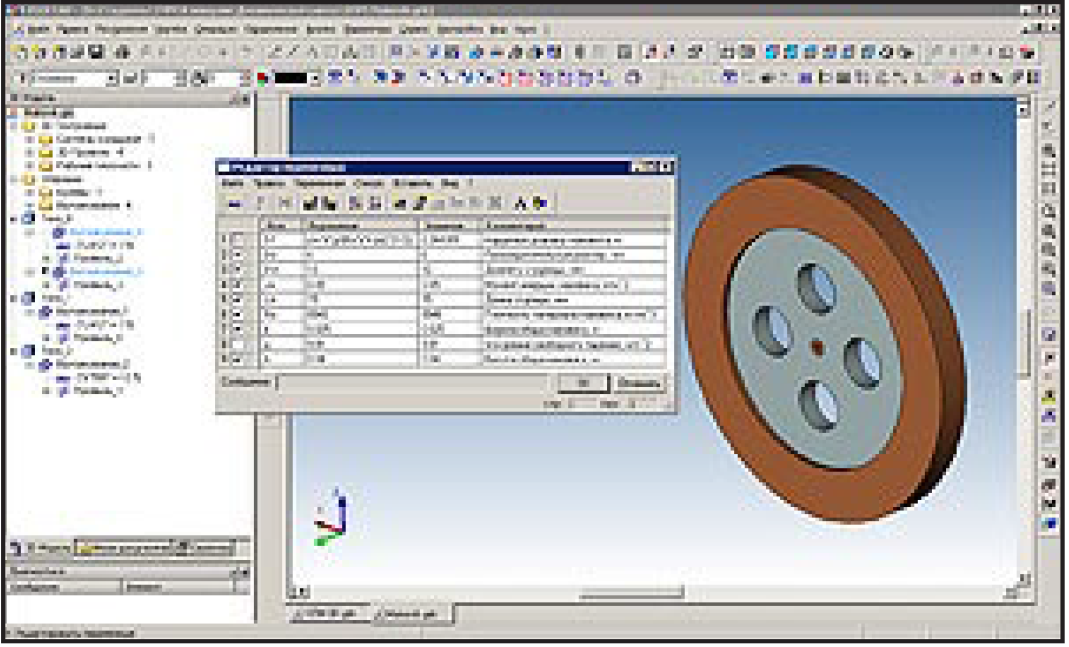
С помощью нагружения «Пружина» можно моделировать не только все типы пружин с продольной деформацией, но и разного рода демпферы и линейные приводы (например, гидроцилиндры). Так, нагрузка на выходное звено кривошипно-ползунного механизма, действующая только в период его рабочего хода (снизу вверх), была смоделирована с помощью этого типа нагружения. С помощью нагружения «Вращение» модуля динамического анализа можно моделировать двигатель с заданной характеристикой. Это позволяет проводить исследование динамики механизма с рассмотрением действительного движения заданного механизма вместе с выбранным приводом.
|
|
|
Решение задач динамического анализа кривошипно-ползунного механизма с помощью его 3D-модели и модуля динамического анализа |
Моделирование внешней нагрузки на выходное звено с помощью нагружения «Пружина» модуля динамического анализа T-FLEX Динамика |
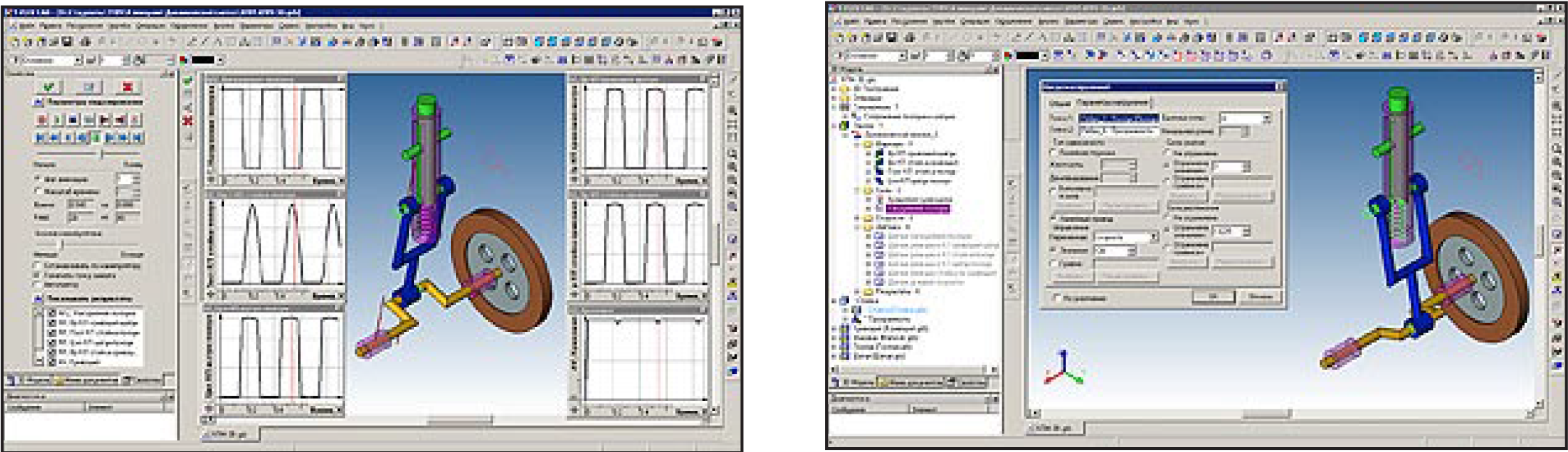
Далее создаются необходимые программные датчики для вывода результатов расчета. Например, датчик типа «Тело» предназначен для измерения координат, линейных и угловых скоростей и ускорений, а также активной силы и момента, действующих на тело. Активной силой или моментом называется сумма всех внешних воздействий на тело. В рассматриваемом примере с помощью такого датчика определяется действительное значение угловой частоты вращения кривошипа. Реакции в кинематических парах определяются с помощью датчиков «Шарнир». Зависимость внешней силы от времени можно получить, используя датчик «Силовой элемент». После того как создана задача динамического анализа, назначены параметры внешних сил и «расставлены» необходимые датчики, можно создать еще один объект задачи динамического анализа T-FLEX — «Результат». Он создается на основе имеющихся в параметрической модели датчиков.
После выполнения расчета модулем динамического анализа получается результат в виде графической зависимости и в табличной форме. Возможно также создание видеофайла на основе анимированной по результатам решения задачи динамики 3D-сцены (с любой точки зрения) с исследуемой механической системой. Таким образом, информация о параметрах динамически изменяющейся механической системы исчерпывающе представляется в различных формах. Эта информация может быть использована для анализа поведения механической системы, а также для сопоставления с результатами, полученными по иным методикам. На заключительном этапе исследуется динамика полученного механизма и определяется его движение под действием заданного или выбранного привода.
При этом может оказаться, что привод не обеспечивает движения механизма, достаточно близкого к требуемому. В таком случае необходимо путем внесения в конструкцию механизма изменений или путем выбора более подходящего привода добиться приемлемого закона движения ведомого звена. Удобно проектировать механизм, одновременно выводя на графический дисплей графики действительного движения звеньев механизма и реакций в его кинематических парах, полученные в результате исследования динамики механизма, поскольку сразу же становится наглядным влияние вносимых в конструкцию изменений на движение и нагрузки звеньев механизма.
|
|
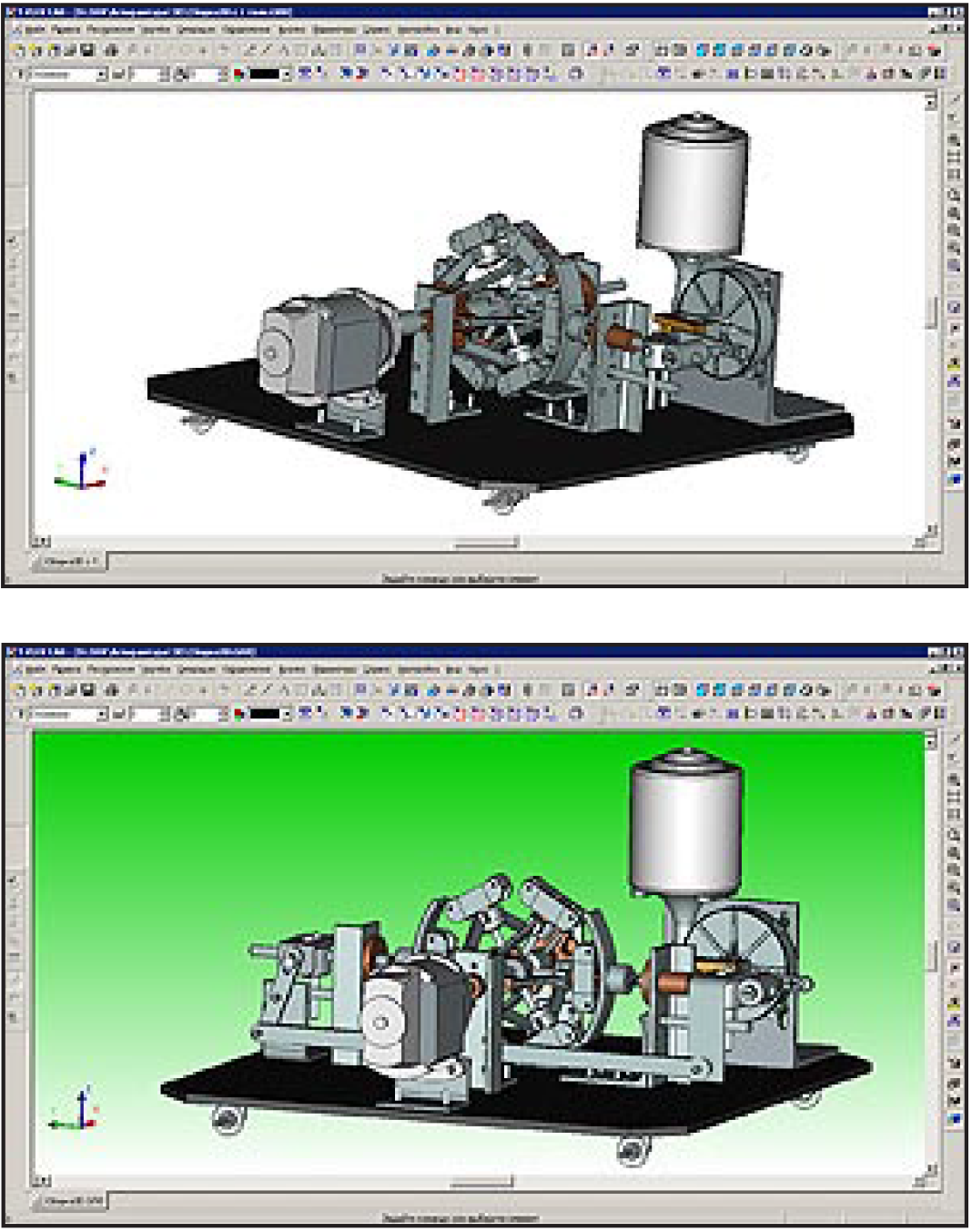
Вибродвижитель переменной структуры с преобразованием вращательного движения в поступательное |
|
|
Вибродвижитель постоянной структуры с преобразованием вращательного движения в поступательное |
В Московском государственном открытом университете (МГОУ) на базе Рязанского института (филиала) МГОУ с 1999 года проводится разработка теории движения вибродвижителя (Патент РФ № 2274574, МПК B62D57/00; F03G3/00, 2006, авторы А.И.Михайлов, В.Д.Плахтин, А.П.Давыдов, С.В.Стрыгин).
Экспериментально подтверждено, что на основе этой теории возможно создание вибродвижителя, квазинезависимого от среды перемещения. Это создает реальные предпосылки для построения на его базе либо специального устройства, повышающего проходимость и управляемость транспортного средства, либо отдельных узлов приводов технологического и подъемно-транспортного оборудования. Элементы трансмиссий машин указанного типа на базе вибродвижителя имеют следующие преимущества:
- незначительная зависимость эффективности работы устройства от фрикционных свойств опорной поверхности (квазинезависимость от среды перемещения) позволяет заключить механизмы вибродвижителя в герметичный корпус, внутрь которого подводится электроэнергия. Это, в свою очередь, обеспечивает эффективность работы машины при неблагоприятных условиях окружающей среды, включая наличие агрессивных сред и тяжелых условий эксплуатации (высокие или низкие температуры, повышенная запыленность, влажность и т.п.);
- увеличение нагрузочной способности по сравнению с традиционными узлами трансмиссий;
- существенное повышение ресурса транспортных машин, подъемно-транспортного и технологического оборудования.
В основу принципа действия вибродвижителей положено преобразование вращательного движения твердых тел в поступательное с использованием в качестве движущих центробежных сил инерции, действующих на тела, вращающиеся относительно одной или нескольких параллельных осей с возможностью перемещения осей перпендикулярно плоскости вращения. Задача динамического синтеза механизма вибродвижителя с преобразованием вращательного движения в поступательное по заданной степени неравномерности движения и величине максимального тягового усилия решается на основании исследования движения центра масс этого механизма, который проектируется неуравновешенным. Неуравновешенным называют такой механизм, в котором при движении центр масс механизма движется с ускорением. Ускоренное движение системы возникает только в случае, если равнодействующая внешних силовых воздействий не равна нулю. В неуравновешенном механизме эти силы не равны нулю. Для обеспечения требуемого направления движения транспортного устройства выполняется частичное уравновешивание механизма вибродвижителя. При этом решается задача, обратная к классической задаче ТММ по уравновешиванию масс звеньев механизма на фундаменте (Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов. 4-е изд., перераб. и доп. М.: Наука. Гл. ред. физ.-мат. лит., 1988. С. 275-291), — задача обеспечения заданного движения центра масс механизма, установленного на подвижном основании (платформе).
Развитие компьютерных технологий сделало возможным моделирование динамики сложных механических систем, существенно повысило эффективность натурных испытаний за счет детальной проработки всех вопросов эксперимента еще на стадии его подготовки. Благодаря широкой функциональности T-FLEX CAD и T-FLEX Динамика получен результат вычислительного (компьютерного) эксперимента, подтверждающий возможность эффективного использования вибродвижителя в качестве дополнительного оборудования автомобиля, а также передаточного механизма технологического оборудования.
Оптимальная (конкурентоспособная) конструкция вибродвижителя и устройств на его базе может быть обеспечена в зависимости от выбранного приоритетного критерия: технологичность, тяговое усилие, степень неравномерности движения, скорость рабочего органа или КПД вибродвижителя. Решение такой задачи требует проведения соответствующих НИОКР, стоимость которых может существенно варьироваться в зависимости от качества и сроков их проектной подготовки.
|
|
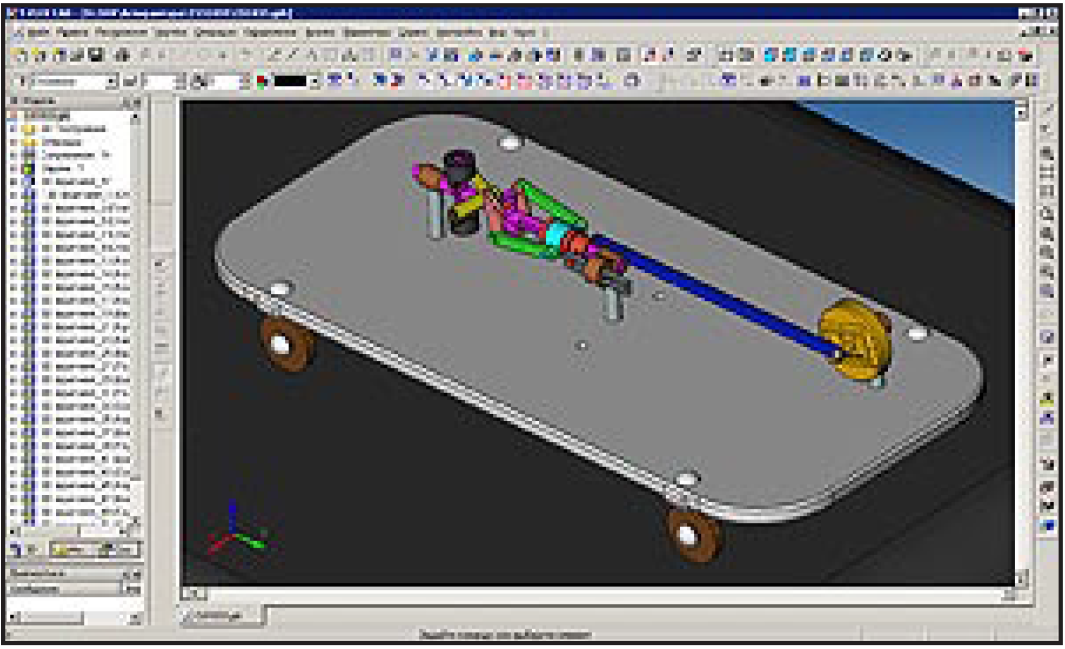
Трехмерная модель и созданный на ее основе пространственный контур механизма вибродвижителя |
|
|
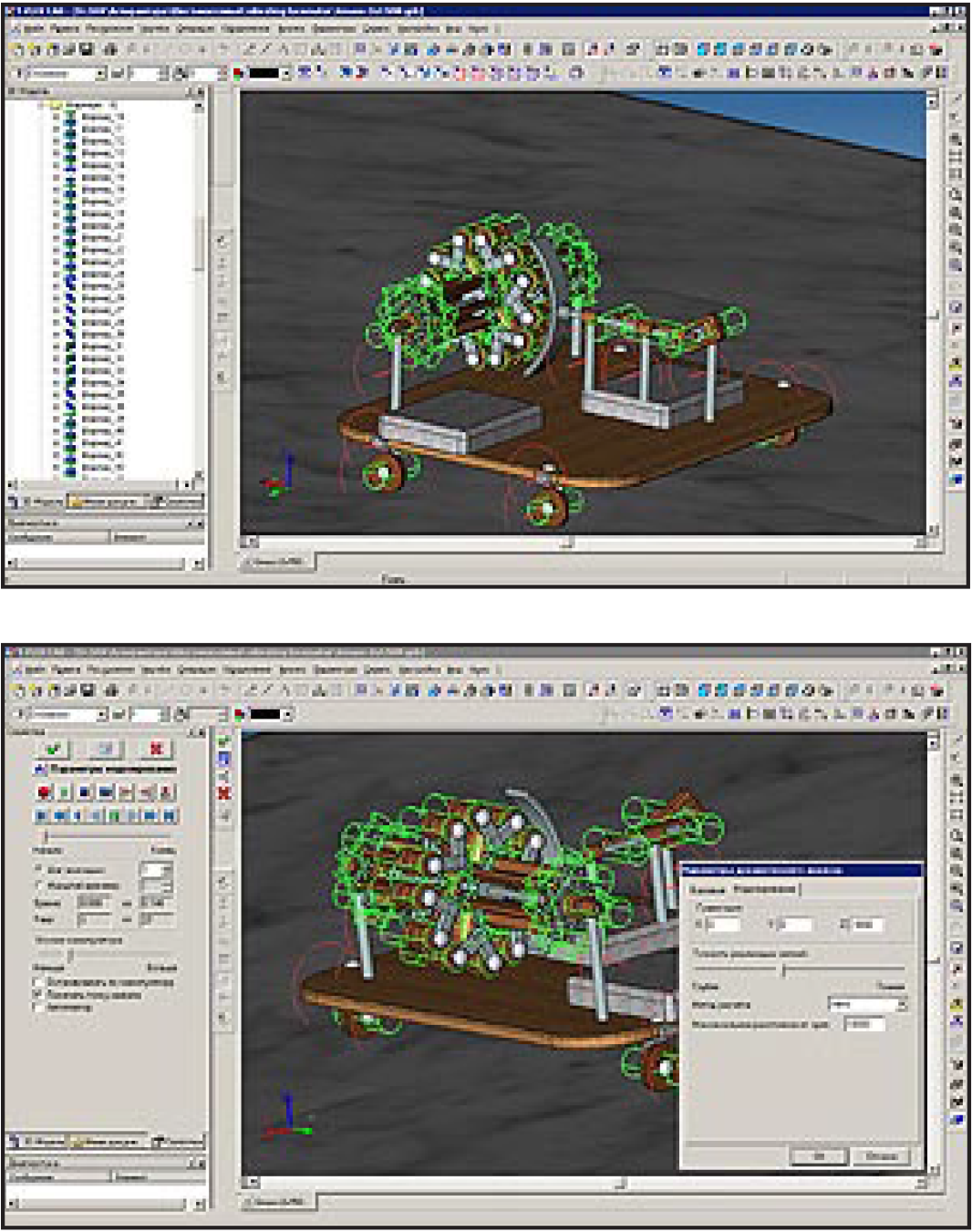
Моделирование динамики вибродвижителя: а -результаты автоматического создания шарниров; б - управление расчетом динамических параметров |
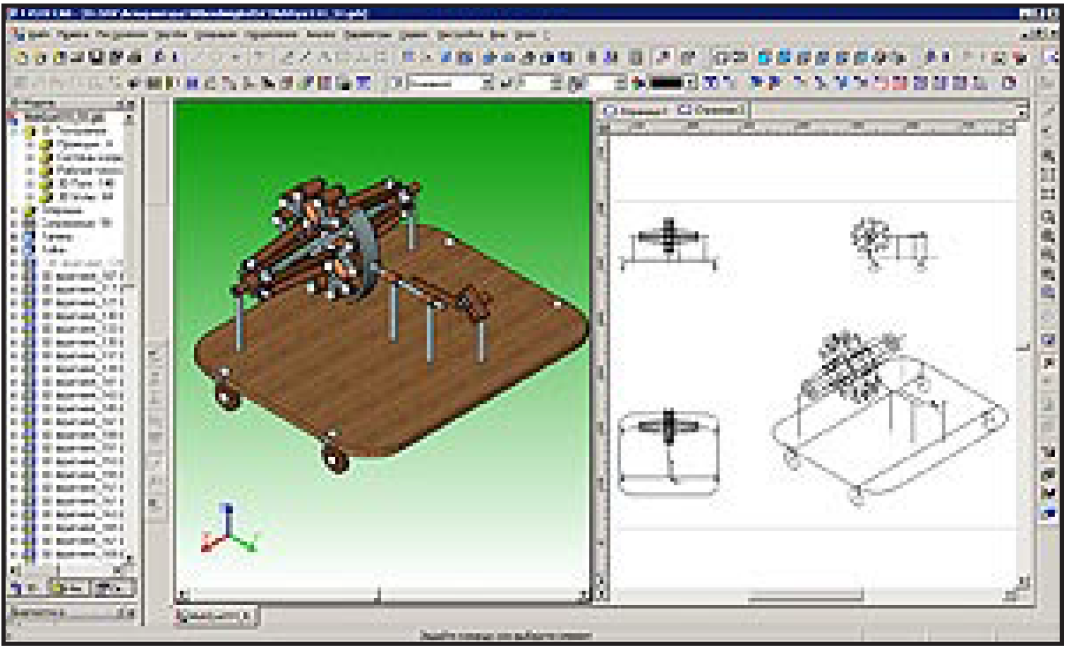
Организация поэтапного контроля результатов проектирования механизма, отработка конструкций кинематических соединений, подготовка конструкторской документации могут быть эффективными лишь при условии выполнения проекта на основе пространственной параметрической модели (3D- сборки) механизма. Пространственная сборочная модель механизма, помимо параметрически задаваемых размеров звеньев, допускает оперативное задание требуемого положения механизма. Наиболее эффективное создание такой сборочной модели возможно с использованием сопряжений. САПР T-FLEX CAD оснащена инструментами для создания сборок по сопряжениям. В результате существенно облегчается процесс создания изображения кинематических схем пространственных механизмов при использовании трехмерной модели механизма, состоящей из упрощенно представленных конструкций звеньев и кинематических пар с помощью проекций соответствующих 3D-путей.
Такие 3D-пути должны присутствовать во фрагментах звеньев как внешние. Это обеспечивает автоматическое присутствие этих 3D-путей в сформированной снизу вверх трехмерной сборке пространственного механизма. Внешний 3D-путь этих фрагментов может быть построен, например, между точками, лежащими на осях, которые проходят через центры шарниров звена, моделируемого во фрагменте. Задача сводится к автоматическому построению контура сложного механизма и последующему его проецированию. Эта проекция составляет основу изображения кинематической схемы механизма в заданном положении.

|
|
Результаты моделирования динамики вибродвижителя: графики перемещения, скорости и ускорения платформы вибродвижителя относительно опорной поверхности |
Сопряжения — элементы системы T-FLEX CAD, позволяющие назначать различные связи на геометрические объекты двух операций-компонентов (3D-точки, оси, кривые, плоскости и поверхности), следует отличать от сопряжений из механизмов и машин. Согласно последней, «сопряжение — кинематическая пара, в которой твердые тела соприкасаются непосредственно между собой». Сопряжения, являющиеся элементами системы T-FLEX CAD, — это более широкое понятие, подразумевающее моделирование контактирования не только твердых тел по их элементам (вершинам, ребрам и граням), но и таких абстракций, как точка, ось, кривая, плоскость и поверхность. Таким образом, сборка механизма, сформированная с использованием сопряжений, может служить основой для разработки конструкции сложного механизма, проведения вычислительного эксперимента с применением программного модуля динамического анализа механических систем T-FLEX Динамика. В заключение отметим, что качественное и функциональное развитие программной продукции, предлагаемой фирмой «Топ Системы», уже сегодня обеспечивает все требования, диктуемые жесткой конкуренцией на рынке САПР. Клиентоориентированный подход, наличие множества собственных разработок и солидные партнеры отличают эту фирму от других. Функциональными особенностями программного комплекса T-FLEX являются доступная параметризация, трехмерное моделирование, возможность моделирования динамики сложных механических систем, широкий набор проблемно ориентированных (специализированных) компонентов САПР с возможностью дополнения силами пользователей с ограниченными навыками программирования, а также полная линейка CAD/CAM/CAE/CAPP/PDM-систем.